Beim Vorliegen der Übertragungsgleichung oder -funktion kann die Beschleunigung der Übertragungsgröße unmittelbar aus Gleichung 1.17 ermittelt werden. Üblicherweise werden jedoch auch hier die Beschleunigungen der Glieder in ausgezeichneten Stellungen mittels des erstens Satzes von Euler bestimmt.
Erster Satz von Euler für die Beschleunigung
Jede ebene, beschleunigte Bewegung eines starren Körpers setzt sich zusammen aus der Translation eines Körperpunkts sowie einer Rotation des Körpers um eben diesen Punkt. Die rotatorische Beschleunigung kann wiederum in einen radialen und einen zirkularen Anteil zerlegt werden.
Die Vorgehenweise sei wiederum an einer Kurbelschwinge demonstriert.
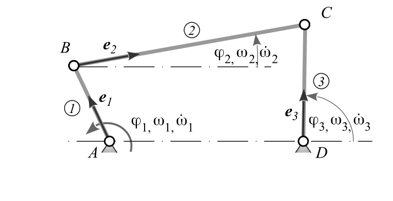
Abb. 1.7: Beschleunigung des Viergelenks
Die Gliedgeometrie und die Geschwindigkeitsverhältnisse liegen uns bereits vor. Wir benötigen nun die Winkelbeschleunigungen von Koppel und Schwinge, sowie die Beschleunigungen der Punkte B und C. Wir beginnen auch hier mit der Anwendung des ersten Euler'schen Satzes auf die Kurbel und erhalten
aB=ω˙1r1−ω12r1
Die Beschleunigung von C als Punkt der Koppel und gleichzeitig als Punkt der Schwinge führt zur Bedingung
aB+ω˙2r~2−ω22r2=ω˙3r~3−ω32r3
Die Multiplikation dieser Vektorgleichung mit r3 und r2 liefert die Winkelbeschleunigungen