Mechanismentechnik Wiederholung
Getriebekinematik
Oktober 2020
Keywords: Mechanismentechnik, Bewegungs- und Kraftübertragung, Getriebekinematik, Schleifengleichung, Viergelenk, g2, mec2
1.1 Getriebekinematik
Die Kenntnis der kinematischen Eigenschaften eines Getriebegliedes nutzen wir nun,um die Wechselwirkung mehrerer verbundener Glieder innerhalb eines Mechanismus näher zu untersuchen. Die Getriebekinematik ist der Teil der Getriebeanalyse, der sich mit der Geometrie der Bewegung der beteiligten Glieder befasst. Getriebestruktur und Abmessungen der Bauteile sind bereits bekannt und als Methoden werden graphische, graphoanalytische und vektorielle Verfahren eingesetzt. Der Schwerpunkt liegt weiterhin auf dem Letzteren (vgl. Gössner 2017, S.89).
1.2 Maschengleichung
Eine sehr allgemeine, vektoriell analytischen Vorgehensweise zur geometrischen Getriebebeschreibung bedient sich der Maschengleichung. Hierbei werden die Maschen (Schleifen) geschlossener kinematischer Ketten als Polygonzug betrachtet (vgl. Gössner 2017, S.89).
Die Maschenzahl ebener Getriebe gehorcht der Beziehung
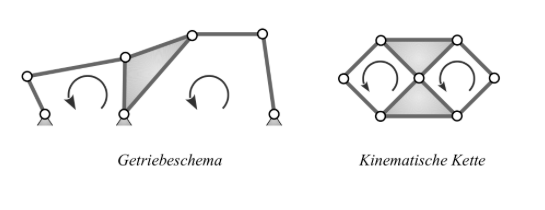
Abb. 1.1: Maschen von Getriebe und kinematischer Kette (vgl. Gössner 2017, S.89)
Wenden wir die Maschengleichung auf das Viergelenkgetriebe in Bild 1.2 an, so erhalten wir die Schließbedingung
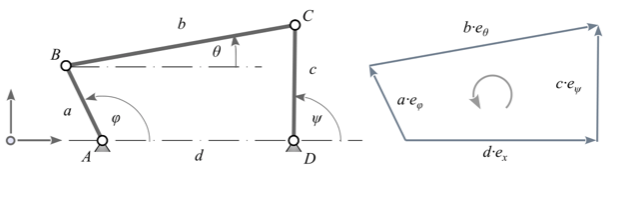
Abb. 1.2: Schleife des Viergelenks (vgl. Gössner 2017, S.90)
unter Verwendung von Gliedlänge und Winkel in polarer Schreibweise
Wenn wir nun diese Vektorgleichung in ihre skalaren Komponente zerlegen, gewinnen wir zwei algebraische Gleichungen, die so übrigens auch aus entsprechenden geometrischen Überlegungen hervorgehen.
(1.1)
Diese Gleichungen eignen sich prima, um weiterführende analytische Untersuchungen am Viergelenkgetriebe durchzuführen.
References
Gössner, S., 2017. Mechanismentechnik: Vektorielle Analyse ebener Mechanismen. Berlin: Logos