Mechanismentechnik Wiederholung
Beschleunigung
Oktober 2020
Keywords: Mechanismentechnik, Bewegungs- und Kraftübertragung, Getriebekinematik, Schleifengleichung, Viergelenk, Lageanalyse, Übertragungsfunktion, Koppelkurven, Geschwindigkeit, Beschleunigung, Relativbewegung, g2, mec2
1.8 Relativbewegung
Wenn Drehgelenke angetrieben werden, ist die Drehzahl des angetriebenen Glieds anhand des vorliegenden Winkelgeschwindigkeitsverlaufs zu jedem Zeitpunkt bekannt. Ist nun das andere – am Gelenk beteiligte – Glied seinerseits beweglich, sind die Gesetzmäßigkeiten der Relativbewegung anzuwenden. Dies gilt grundsätzlich für gesuchte Winkelgrößen und deren zeitliche Ableitungen aus Sicht beweglicher Glieder. Insbesondere kann hierbei sie 3-Ebenen Gleichung vorteilhaft eingesetzt werden (vgl. Gössner 2017, S.81 f.).
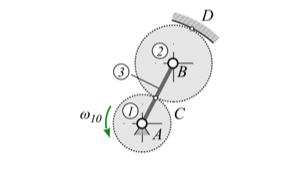
Abb. 1.8: Planetenradstufe
Die Vorgehensweise wird am Beispiel einer Planetenradstufe (Abb. 1.8) näher erläutert. Das Sonnenrad 1 und das Planetenrad 2 stehen miteinander im Eingriff. Ihre Wälzkreise berühren sich im Punkt
Im punkt
Die Geschwindigkeit im Punkt
Aus diesen letzten Gleichungen lässt sich
Die erste Gleichung liefert damit
Aus den nun gegebenen absoluten Winkelgeschwindigkeiten kann beispielsweise die relative Winkelgeschwindigkeit
erhalten wir
Die sog. Standübersetzung
Die Relativkinematik lässt sich genauso gut zur Analyse ungleichförmiger Getriebe anwenden.
References
Gössner, S., 2017. Mechanismentechnik: Vektorielle Analyse ebener Mechanismen. Berlin: Logos